| Titel: | F. A. Bourry's dynamometrischer Regulator; von G. Delabar. |
| Fundstelle: | Band 236, Jahrgang 1880, S. 188 |
| Download: | XML |
F. A. Bourry's dynamometrischer Regulator; von G.
Delabar.
Mit Abbildungen auf Tafel 18.
Delabar, über Bourry's dynamometrischer Regulator.
Bei dem Watt'schen Kegelregulator und bei allen auf demselben Princip beruhenden
neuern Centrifugalregulatoren wird bekanntlich der Gang der betreffenden Maschine
von der Umdrehungsgeschwindigkeit derselben abhängig gemacht. Mit der Vergröſserung
der motorischen Kraft, bezieh. mit der Verminderung des nützlichen
Arbeitswiderstandes vergröſsert sich nämlich die Umdrehungsgeschwindigkeit der
Maschine, mit der Abnahme der motorischen Kraft, bezieh. mit der Zunahme des
Arbeitswiderstandes dagegen verringert sich dieselbe. Und mit der vergröſserten oder
verringerten Geschwindigkeit wird auch die Centrifugalkraft der beweglichen Kugeln
vergröſsert oder verringert, in Folge dessen sich diese sammt Muff heben oder senken
und durch den damit in Verbindung stehenden Mechanismus den Zutritt des Motors
entsprechend verringern oder vergröſsern. Da jedoch wegen des unvermeidlichen
Reibungswiderstandes, welcher bei der Bewegung des Muffes sammt Hebel und Gestänge
durch die Schwungkugeln zu überwinden ist, diese sich nicht bei jeder beliebig
kleinen Geschwindigkeitsänderung heben oder senken können, so muſs dieselbe erst bis
zu einer gewissen Gröſse anwachsen, bis die dadurch entstehende Zu- oder Abnahme der
Centrifugalkraft hinreicht, den Reibungswiderstand des Mechanismus zu überwinden. In
diesem Umstände liegt die Ursache, warum alle bisherigen Versuche, auf Grund des
angedeuteten Principes der Centrifugalregulatoren den Gang einer Maschine vollkommen
regelmäſsig zu erhalten, scheitern muſsten.
Zur Erreichung dieses Zieles geht F. A. Bourry in St. Gallen, der Erfinder des neuen dynamometrischen Regulators (* D. R. P. Kl. 60 Nr. 8277 vom 5. März 1879), von einem ganz
anderen Standpunkt aus und bedient sieh hierbei eines direct wirkenden Factors, der
sich in dem Motor dargebotenen Widerstand selbst findet und womit das Problem der
Regulirung auf höchst geistreiche Weise gelöst wird.
Bei allen Motoren besteht nämlich zwischen der Triebachse und der getriebenen Welle
eine Torsion, d.h. ein Bestreben, diese zu verdrehen. Dieses Torsionsbestreben,
welches genau in demselben Verhältniſs steigt und fällt, wie der dem Motor
dargebotene Widerstand gröſser oder kleiner ist, wird nun bei dem neuen
dynamometrischen Regulator dadurch benutzt, daſs man eine solche Torsion, und zwar
in verstärktem Maſse, wirklich stattfinden läſst, indem man den Zusammenhang der
Welle des Motors unterbricht und dieselbe in zwei voneinander unabhängige Theile
trennt, welche dann, durch elastisch wirkende Mechanismen (Spiralfedern) verbunden,
eine je nach der Gröſse der beanspruchten Kraft sich anpassende Stellung annehmen.
Das Spiel, welches in einer solchen elastischen Kupplung entsteht, ist fortwährend
in jedem Augenblick der genaue Ausdruck der Schwankungen in dem Widerstände, somit
auch das rascheste, richtigste und kräftigste Mittel, um den Zufluſs der treibenden
Kraft zu reguliren. Da aber genanntes Spiel innerhalb einer kreisförmig drehenden
Bewegung unzugänglich ist, so muſs dasselbe in geeigneter Lage zu einem geradlinig
hin – und hergehenden gemacht werden, und zwar parallel zur Triebachse, um auf die
Drosselklappe, das SchützenbrettSchutzbrett oder sonstige Regulirvorrichtungen übertragen werden zu können.
Das Eigenthümliche und Charakteristische des Bourry'schen Regulators im Vergleich mit den erwähnten bisherigen
Centrifugalregulatoren besteht darin, daſs hierbei eine Verzögerung oder
Beschleunigung in der Umdrehungsgeschwindigkeit des Motors nicht erst abgewartet
werden muſs, um den nöthigen Einfluſs auf den Steuerungsapparat auszuüben, sondern
daſs die Wirkung des Motors und somit auch die Regulirung der getriebenen Welle,
trotz noch so bedeutender und plötzlicher Schwankungen in dem zu überwältigenden
Widerstände, stets eine momentan eintretende ist.
Die ganze Kraft des Motors wird durch den dynamometrischen Regulator übergeleitet, es
werden somit alle durch Reibung entstehenden Widerstände vollständig gegenstandslos
und bleiben ohne Wirkung auf die Functionen des Regulirapparates, während gerade sie
es sind, welche, wie oben kurz angedeutet worden ist, die Empfindlichkeit der
Centrifugalregulatoren bedeutend beeinträchtigen und ihre Wirkung verspäten, die
Regulirung also unvollkommen machen.
Ein weiterer, nicht zu unterschätzender Vortheil dieses neuen Apparates ist der, daſs
derselbe gleichzeitig als Regulator oder – ohne solchen – als Dynamograph oder Kraflregistrirapparat verwendet werden kann, indem im letztern Fall sein
Spiel einfach durch eine geeignete Vorrichtung auf einem fortlaufenden
Papierstreifen mit einem Stift graphisch zu verzeichnen ist, wodurch ein getreues
Bild der verwendeten Kraft erhalten wird, das es ermöglicht, etwa eintretende
ungebührliche Reibungen oder andere an irgend einem Maschinentheile entstehende
Störungen sofort zu entdecken. Bei einem Bruchirgend eines Maschinentheiles wird der
Zufluſs des Motors (Dampfes, Wassers o. dgl.) augenblicklich unterbrochen und die
Maschine abgestellt.
Von ganz besonderem Werth ist der Bourry'sche
dynamometrische Regulator für Schrauben schiffe, bei deren Maschinen der Watt'sche
Regulator, trotz aller an demselben angebrachten Verbesserungen, nicht mit der
nöthigen Sicherheit verwendet werden kann und sich auch andere auf dem gleichen
Princip beruhende Vorkehrungen als nicht zuverlässig erwiesen haben.
Der Mechanismus des dynamometrischen Regulators oder Dynamographes kann zur
Erreichung desselben Zieles auf verschiedene Weise eingerichtet sein. Bourry hat zunächst folgende beide Anordnungen
ausgedacht und sich patentiren lassen.
Die erste derselben ist hauptsächlich für kleinere
Kräfte geeignet, weil sie vermöge ihres auſserordentlich leichten,
kreisförmig drehenden Spielraumes von der einen treibenden zur andern getriebenen
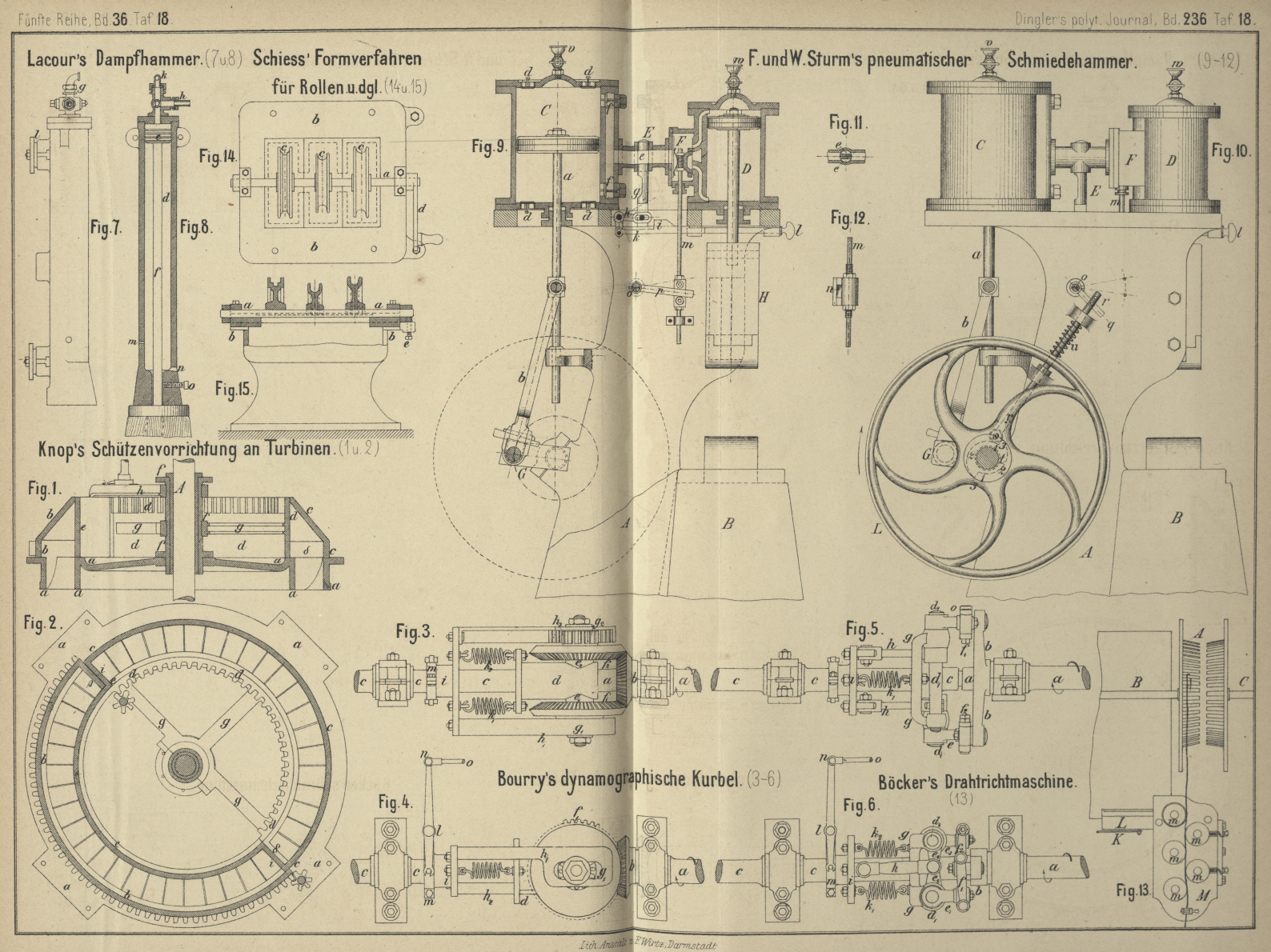
Welle eine sehr groſse Empfindlichkeit und Energie bewirkt. Diese Anordnung ist in
Fig. 3 und 4 Taf. 18
dargestellt. Darin bedeutet a das Ende der
Antriebwelle, das mit dem Kegelrad b versehen ist, und
c die Transmissions- oder getriebene Welle, auf
welcher die Nabe d mit zwei einander gegenüber
liegenden Schildzapfen e1, e2
befestigt ist, in der Art, daſs die Antriebwelle a
etwas, und zwar lose, in die Nabe d hineinreicht und so
eine Führung erhält, um etwaige Biegungen zu verhindern. Die Zapfen e1, e2 tragen Kegelräder
f1, f2, welche sich frei
drehen können und in das Kolbenrad b eingreifen. Wird
nun der Antrieb in Drehung gebracht, so würden natürlich die beiden gleichen Räder
f1, f2 für sich mitgenommen
werden, wenn die Zapfen derselben nicht weiter mit der getriebenen Welle c verbunden wären. Da sie aber mit gezahnten Stäben g1, g2 versehen sind, von
welchen jede in eine entsprechende Zahnstange h1, h2 eingreift, so werden diese in Folge ihrer
entgegengesetzten Stellung nach einer und derselben Richtung geschoben, und da sie
an ihrem anderen Ende an einem auf der Welle c
gleitenden Muffe i befestigt sind und dieser wiederum
vermöge der mit ihm und der festen Nabe d verbundenen
Spiralfedern k1, k2 zurückgehalten wird,
so hört die Verschiebung der Zahnstangen auf, sobald die Federn bis zum Aequivalent
im Widerstand gespannt sind und die Transmissionswelle c die gleiche Drehungsgeschwindigkeit annimmt wie die Triebwelle a. Bei einer Vermehrung des Widerstandes geben die Federn auch nur so
viel nach, als der vergröſserte Widerstand erfordert. Im entgegengesetzten Fall,
wenn der Widerstand verringert wird, bewirken die Federn wieder eine umgekehrte
Verschiebung der Zahnstangen, somit auch des auf der Transmissionswelle c gleitenden Muffes i, von
welchem aus dieses Spiel entnommen und auf beliebige Weise durch den Hebel mn mit dem Drehpunkt l und
dem Gestänge no auf die Drosselklappe, das SchützenbrettSchutzbrett o. dgl. übertragen wird.
Die zweite in Fig. 5 und
6 Taf. 18 veranschaulichte Construction ist hauptsächlich für Schraubenschiffe und für
solche gröſsere Maschinen bestimmt, welche, wie dies z.B. bei den gröſseren Walzwerken der Fall ist, plötzlichen groſsen
Belastungen oder Widerständen ausgesetzt sind. Rechts befindet sich wieder die
Antriebwelle a, deren Ende mit einer Doppelkurbel b versehen ist. Auf dem Ende der getriebenen Welle c links ist eine Art Mitnehmer g befestigt, welcher zwei kleine oscillirende Achsen d1, d2 trägt, wovon eine
jede mit einem Kniehebel oder zwei zu einander senkrecht stehenden Krummzapfen e1, e2 und e3, e4 versehen ist. Der
eine dieser Schenkel ist mit einem der Zapfen der Doppelkurbel b auf dem Antrieb durch Gelenke f1, f2 verbunden, während der andere Schenkel vermöge
einer Stange h mit einem auf der getriebenen Welle c gleitenden Muffe i in
Verbindung steht, welcher auch, wie bei der ersten Anordnung, durch Federn k1, k2 von entsprechender
Stärke und Anzahl gehalten wird, die selbst wieder mit dem Mitnehmer g zusammenhängen. Die eben beschriebene Zusammensetzung
ist, wie man sieht, ebenfalls doppelt angeordnet, um das Gleichgewicht herzustellen
und die Festigkeit zu vermehren. Wie leicht ersichtlich, wird hier durch die
Doppelkurbel, Kniehebel, Stangen und Gelenke dem Gleitmuffe die gleiche Hin- und
Herbewegung mitgetheilt wie in der oben beschriebenen ersten Construction.
Tafeln