| Titel: | Neue Regulatoren. |
| Fundstelle: | Band 272, Jahrgang 1889, S. 337 |
| Download: | XML |
Neue Regulatoren.
(Patentklasse 60. Fortsetzung des Berichtes Bd.
270 S. 445.)
Mit Abbildungen auf Tafel
16 und 17.
Neue Regulatoren.
Bei schwereren Regulatoren namentlich erweist sich die Benutzung einer Oelbremse als
durchaus nothwendig, um das unangenehme Zucken und Pendeln der Regulatoren um eine
mittlere Gleichgewichtsachse zu verhindern, welches sich als eine Folge des
Rückdruckes von der Steuerung, zu geringer Schwungmassen in der Maschine oder zu
groſser Massen im Regulator störend bemerkbar macht. Die Aufstellung und Einfügung
einer solchen Bremse ist jedoch oft sehr umständlich, so daſs es als glücklicher
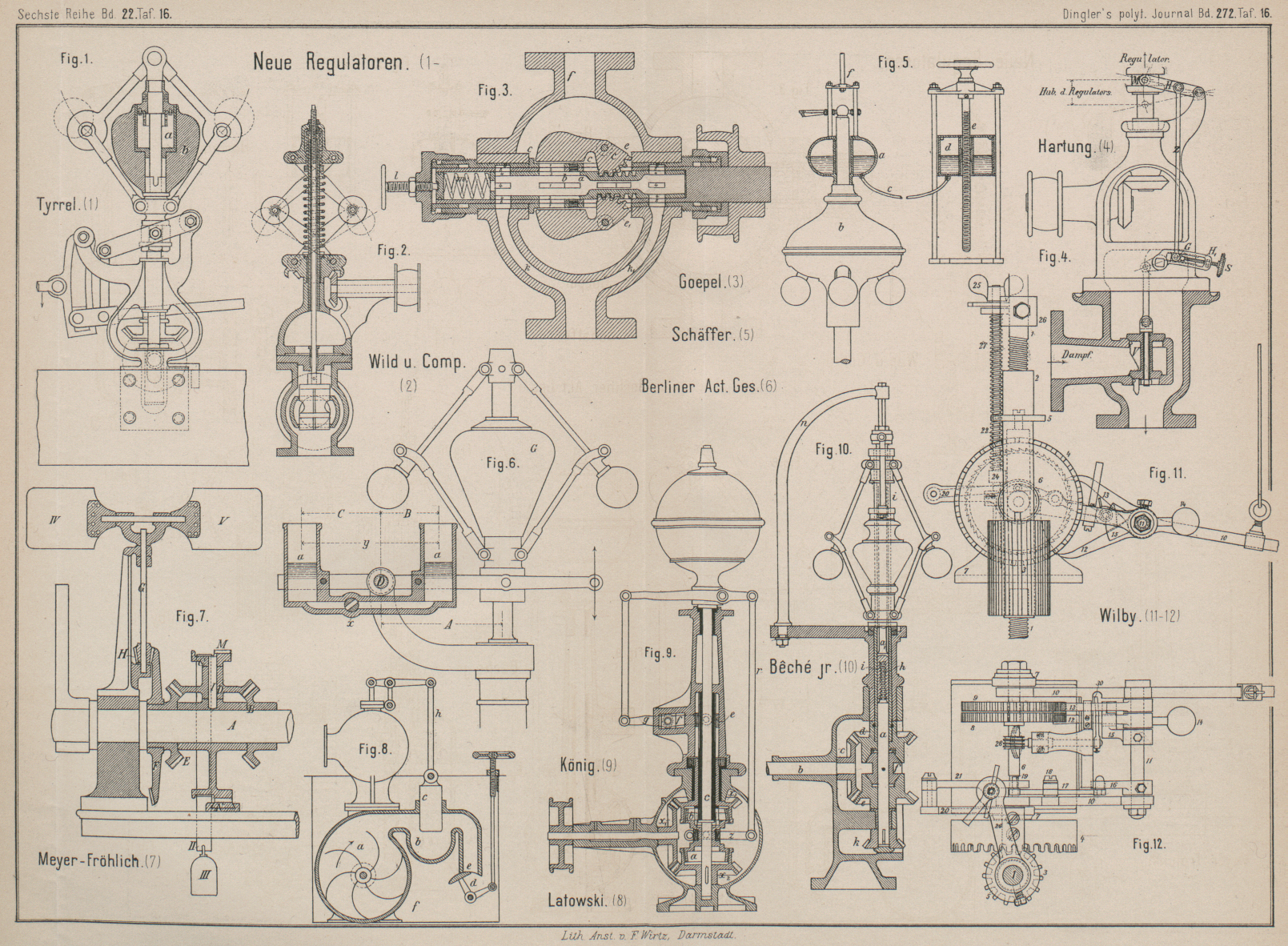
Gedanke bemerkt werden kann, wenn Ingenieur Tyrrel der Firma Clayton and Shuttleworth in Lincoln einer Mittheilung
im Engineering vom 28. December
1888 zu Folge die Oelbremse a in die
Belastungsurne b des Regulators einschaltet. Fig. 1 Taf. 16
zeigt die allgemeine Anordnung des Regulators mit der Bremse; der Regulator selbst
bietet keine weiteren hervorragenden Eigenthümlichkeiten.
Entgegen der üblichen Anordnung wird bei dem in Fig. 2 Taf. 16
dargestellten Regulator von J. Wild and Comp. in
Chadderton, Oldham (Engineer, 1888 * S. 137), die in
eine Schraube auslaufende Spindel des Regulirventils von einem oberhalb der
Pendelgelenkpunkte angebrachten Schraubenmechanismus bethätigt, dessen allgemeine
Einrichtung durch die Zeichnung klar wird. Die Stelle des Hülsengewichtes vertritt
hier eine Feder, durch deren Anwendung bekanntlich der Regulator für verschieden
groſse Umlaufszahlen eingestellt werden kann. Letzteren entsprechend kann auch die
Ventilspindel selbst auf und nieder geschraubt Werden, um den Durchlaſs zu
vergröſsern oder zu verkleinern, bezieh. kann auch das Ventil durch Bewegung seiner
Spindel geschlossen werden.
Eine eigenartige Vereinigung der Ventildurchlässe mit dem Regulirkörper zeigt die
Anordnung von G. Goepel in Merseburg (* D. R. P. Nr.
42713 vom 3. Juli 1887) (Fig. 3 Taf. 16).
Der Regulator besteht aus zwei in einander geschobenen und mit Sehlitzen für den
Dampf-Ein- und -Austritt versehenen Spindeln a und b. Die dritte Spindel c,
welche mit der zweiten b durch Stiftschrauben verbunden
ist, hat den Zweck, ein seitliches Verschieben der Spindel b zu verhindern. An der äuſseren Spindel c
sind noch Arme angegossen, zwischen welchen das Schwunggewicht mit dem Zahnsegmente
e gelagert ist. Die innere Spindel hat
Verzahnungen, welche in das Zahnsegment e
eingreifen.
Der Dampf tritt durch die Oeffnung f in das
Regulatorgehäuse, geht durch die Schlitze 1, 2 und 3 in die Spindel a; aus
derselben entweicht der Dampf wieder durch die Schlitze 4 und 5 in die Aussparung 6 und strömt durch die Kanäle k und k1 der
Maschine zu.
Bekommt nun der Regulator eine gröſsere Geschwindigkeit, so werden die Schwunggewichte durch
die Centrifugalkraft aus einander fliegen. Die innere Spindel a wird durch die Zahnsegmente e und e1 nach
links geschoben, wodurch die Austrittskanäle geschlossen werden lind der Dampf von
der Maschine abgesperrt wird.
Hat die Maschine ihren normalen Gang wieder erreicht, so kommen die Schwunggewichte
und die Spindel a auf ihre ursprüngliche Lage wieder
zurück und werden dadurch die Austrittskanäle wieder ganz geöffnet. Als Gegendruck
dient die Spiralfeder m. Durch die Druckschraube t kann man die Feder mehr oder weniger spannen, wodurch
die Hülse a im Verschieben nach links einen gröſseren
oder kleineren Widerstand entgegengesetzt bekommt, so daſs dadurch die Umlaufszahl
von auſsen beliebig gestellt werden kann.
Bei den Drosselapparaten entspricht die ganze Bewegung des Regulators stets der
ganzen Bewegung des Ventils. In Folge dessen arbeiten die Regulatoren bei schwach
belasteten Maschinen, sowie bei im Verhältnisse zum Dampfverbrauche sehr groſsen
Einströmungskanälen fast nur in der obersten Stellung und sperren den Dampf fast
ganz ab. Bei der dann unvermeidlich eintretenden wesentlichen Verlangsamung des
Ganges der Maschine fallen die Regulatoren in die untere Stellung und geben wieder
plötzlich ein zu groſses Quantum Dampf. Der Zweck des in Fig. 4 dargestellten
Apparates von H. Hartung in Quedlinburg (* D. R. P. Nr.
41230 vom 30. April 1887) ist nun der, die Stellung bezieh. Bewegung des Ventils so
zu regeln, daſs der Regulator das Ventil stets von seiner mittleren Stellung aus
öffnet oder schlieſst und somit im Stande ist, der Maschine den Dampf stets mit der
gröſsten Gleichmäſsigkeit und genau nach Bedarf zuzuführen.
Der Muff M des Regulators bewegt mittels des Hebels H und der Stange Z und des
Hebels H1 das Ventil
V. Der Hebel H1 ist mit einer eigenthümlich geformten Gleitbahn
versehen, auf welcher sich mittels der Schraube S der
mit der Stange Z verbundene Gleitklotz G verschieben läſst. Verstellt man mit der Schraube S den Gleitklotz G z.B.
nach rechts, so wird das Hebelverhältniſs zwischen dem Hube des Regulators und dem
Ventil derart verändert, daſs letzteres einen kürzeren Weg zurücklegt; durch die
Form der Gleitbahn wird aber auch das Ventil um ebenso viel heruntergesenkt, als die
Verkürzung des Weges beträgt. Es kommt also immer der ganze Muffenhub des Regulators
zur Ausnutzung und die Endstellungen des Ventils entsprechen denen des Regulators.
Die Gleitbahn kann auch am oberen Hebel angebracht werden.
Ueber den in D. p. J., 1886 261 * 150, beschriebenen Klein'schen
Frictions-Centrifugal-Regulator werden im Praktischen
Maschinen-Constructeur, 1889 * S. 100, folgende theoretischen Erwägungen
veröffentlicht:
Während bei Regulatoren anderer Systeme der Unterschied (P –
P1) der Centrifugalkraft, multiplicirt mit
dem nutzbaren radialen Ausschlage der Schwunggewichte (R – R1), ein Maximum an
Arbeit liefert, welches unter allen Umständen zur Ausführung der ganzen Bewegung des
Drosselventiles u.s.w. von einer Stellung bis zur anderen ausreichen muſs, ist bei
dem von Eugen Klein in Tilsit hergestellten
Centrifugal-Frictions-Regulator kein mit der Arbeitskraft zu multiplicirender
Ausschlag der Schwunggewichte vorhanden. Seine Arbeit ist nach den Angaben des
Erfinders nur das Product folgender Factoren:
(P – P1); Differenz der Centrifugalkraft,
\left(\frac{d}{b}\right)=1,5\ \mbox{bis}\ 2,5; Hebelverhältniſs
in den Federn der Schwunggewichte,
φ = 0,25 bis 0,4; Reibungscoefficient,
l =2000 bis 4000; Weg in Millimeter der reibenden
Fläche des Frictionsrädchens in einer Secunde,
t = 10 bis 15 Secunden und mehr; die Zeit, welche man,
unbeschadet des regelmäſsigen Ganges der Maschine, dem Regulator zur Verrichtung der
ganzen Arbeit von einer extremen Stellung des Drosselventiles bis zur anderen geben
kann.
Die Gröſse dieses zuletzt erwähnten Factors t richtet
sich nach den Anforderungen, welche man wegen der auf die Maschine zurückwirkenden
Arbeitsveränderungen an den Regulator stellen muſs.
Es erfordert eine Maschine mit leichtem Schwungrade und plötzlichen gröſseren
Arbeitsänderungen einen kleineren Factor t als eine
solche mit gröſserer Schwungmasse und weniger plötzlichen Arbeitsänderungen. Die
Schnelligkeit der Ventilbewegung muſs möglichst gleich derjenigen sein, mit welcher
sich die Arbeitsänderung von den Arbeitsmaschinen auf die Dampfmaschine überträgt.
Aus praktischen Versuchen ist man zu dem Ergebnisse gelangt, daſs bei diesem
Regulator 10 bis 15 Secunden = t für allgemein
gebräuchliche Verhältnisse genügen werden. Der Erfinder stellte die Arbeitsleistung
seines Regulators derjenigen irgend eines anderen Centrifugalregulators mit
demselben (P – P1) gegenüber und lieſs dabei den für den
Frictionsregulator günstigen Umstand unberücksichtigt, daſs die Leistung eines
gewöhnlichen Regulators in den verschiedenen Stellungen verschieden ist. Hierbei
gelangte er für den Frictionsregulator zu dem Ergebnisse:
(P-P_1)\,.\,\frac{d}{b}\,.\,\varphi\,.\,l\,.\,t=
(P-P_1)\,.\,1,5\,.\,0,25\,.\,2000\,.\,10=(P-P_1)\,.\,7500^{\mbox{mmk}}
bis
(P-P_1)\,.\,2,5\,.\,0,40\,.\,4000\,.\,15=(P-P_1)\,.\,60000^{\mbox{mmk}},
während sich für einen Regulator eines anderen Systemes
ergab:
(P-P_1)\,.\,(R-R_1)=(P-P_1)\,.\,100^{mmk}.
Klein gibt folgende Berechnung für die Empfindlichkeit
des Regulators.
Es sei:
Q = das Gesammtgewicht der Schwungmasse = 14k,4,
R = der Abstand der Schwerpunkte von der Achse = 0mt,0525
n = die Umlaufszahl in der Secunde = 6 und
v = die Geschwindigkeit des Schwerpunktes in Meter in
der Secunde,
so wird die Centrifugalkraft, welche durch die Spannung der
vier Tragfedern xx balancirt wird,
P=\frac{0,102\,.\,v^2\,.\,Q}{R}=110^k.
Nimmt man die Normalgeschwindigkeit der Maschine zu n
Umgängen an, so wird die Centrifugalkraft bei n1 Umgängen in der Zeiteinheit um
110\,\frac{{n^2}_1-n^2}{n^2} zunehmen (bezieh. abnehmen) und
dieser Druckunterschied sich durch die Hilfsfedern als Seitenschub auf die Achse
übertragen, und zwar mit einem Hebelverhältnisse, resultirend aus der gekrümmten
Form der Federn (200mm Länge und 18mm Ausladung) von annähernd 1 : 2,4, so daſs der
Seitenschub der Achse werden wird
p=2,4\,.\,110\,\frac{{n_1}^2-n^2}{n^2}.
Um die Schieberstange während des Ganges der Maschine zu drehen waren nach Versuchen,
die an einer Maschine von 60 angestellt wurden, weniger als 5k erforderlich, welche auf die Verzahnung des
Rades wirksam waren. Das Geschwindigkeitsverhältniſs dieser Verzahnung und der
Peripherie des Frictionsrädchens ergibt eine Uebersetzung von 1 : 293. Die Reibung
muſs daher werden =\frac{5}{293}= rund 0,017k. Der Seitendruck wird bei einem
Reibungscoefficienten von 0,25:
p=\frac{0,017}{0,25}=0,068^k.
Der Regulator tritt hiernach in Wirksamkeit, sobald der Seitendruck wird
p=2,4\,.\,110\,\frac{{n_1}^2-n^2}{n^2}=0,068^k,\
\mbox{oder}
\frac{{n_1}^2-n^2}{n^2}=0,000258.
Aus dieser Gleichung ergibt sich
n_1=\sqrt{1,000258\,n}=1,000129\,n
als Maſsstab für die Empfindlichkeit des Regulators.
Die in Fig. 5
dargestellte Vorrichtung von B. Schäffer und Comp. in
Hamburg (* D. R. P. Nr. 39712 vom 28. December 1886) bezweckt bei im Gange
befindlichen Regulatoren das Gewicht des sich dem Ausschlage der Schwungkugeln
widersetzenden Körpers direkt zu verringern oder zu vergröſsern, je nachdem ein gröſserer oder
geringerer Grad von Astasie erforderlich wird. Man hat allerdings schon durch
Anwendung einer Oelpumpe, eines Kataraktes u.s.w. Widerstände in den Gang des
Regulators eingeschaltet; dazu war aber die Benutzung von Zwischenmechanismen, Hebel
u.s.w. erforderlich, durch welche der gleichmäſsige Gang der Maschine wesentlich
beeinträchtigt wurde, was sich besonders bei Dynamomaschinen unangenehm bemerkbar
machte. Die angegebene Vorrichtung belastet oder entlastet direkt das auf der
Regulatorwelle befindliche Belastungsgewicht durch Anordnung eines concentrisch um
die Regulatorwelle gelegten Behälters a, welches wohl
in lothrechter Richtung der Bewegung des Gewichtes b
folgt, aber an dessen Umdrehung nicht theilnimmt. Dieser Behälter a steht durch einen Schlauch u.s.w. mit einem zweiten
Behälter d in Verbindung, dessen Höhenlage durch
entsprechendes Drehen der Schraubenspindel e beliebig
verändert werden kann. Beide Behälter sind von gleicher Fassungsgröſse und mit
Quecksilber oder einer anderen Flüssigkeit von groſsem specifischen Gewichte in der
Mittelstellung des Regulators zum Theil gefüllt. Stellt man nun Behälter d höher als a, so wird ein
entsprechender Theil der im ersteren befindlichen Flüssigkeit nach dem Gesetze von
den communicirenden Röhren in Behälter a laufen und
dadurch das Gewicht b entsprechend belasten, während
beim Senken des Behälters d die umgekehrte Wirkung
stattfindet.
Mittels eines Zeigers an der Stange f kann man die
Stellung des Behälters a übersichtlich andeuten.
Es ist durch die Praxis erwiesen, daſs man den Gang von Motoren nicht mit astatischen
Tachometern reguliren kann, vielmehr gezwungen ist, den letzteren einen je nach
Umständen mehr oder weniger groſsen Ungleichförmigkeitsgrad zu geben. Die Folge
davon ist, daſs bei so regulirten Motoren die Geschwindigkeit mit abnehmender
Leistung wächst. Man kann die gesteigerte Geschwindigkeit wieder auf das normale
Maſs bringen, indem man das Belastungsgewicht um ein bestimmtes Maſs verringert; das
Tachometer rotirt dann in der höheren Lage mit derselben Geschwindigkeit, mit
welcher es vorher in der tieferen Lage gearbeitet hatte. Man kann also beim
steigenden Tachometer durch Ent- und beim sinkenden durch Belastung des Gewichtes
die normale Umlaufszahl wieder herstellen. Diese Ent- bezieh. Belastung darf aber
nicht gleichzeitig mit der Auf- bezieh. Abwärtsbewegung des Tachometers stattfinden,
weil dann der für ein gutes Functioniren des Regulators nothwendige
Ungleichförmigkeitsgrad verloren geht; dieselbe darf vielmehr erst dann stattfinden,
wenn eine Veränderung in der Höhenstellung des Tachometers schon stattgefunden
hat.
Um diesen Zweck im Gegensatze zu vorbesprochener Anordnung selbsthätig zu erreichen,
wird von F. Knüttel und der Berliner Actiengesellschaft für Eisengieſserei und Maschinenfabrikation in
Charlottenburg (* D. R.
P. Nr. 45706 vom 16. Mai 1888) die in Fig. 6 abgebildete
Vorrichtung in Vorschlag gebracht.
Zwei Gefäſse a sind unten mit einander verbunden und bis
zu einer gewissen Höhe mit einer Flüssigkeit, z.B. Quecksilber, gefüllt. Diese
communicirende Röhre wird an einem wagerechten, vom Tachometer bewegten Hebel
befestigt, so daſs sie die Schwingungen des Hebels mitmacht. Nach dem Heben der
Schwungkugeln wird das Gewicht G ent-, dagegen nach dem
Sinken derselben belastet. Durch Veränderung des Verbindungsquerschnittes bei x wird der Ausgleich früher oder später eintreten, und
mit der Veränderung der Entfernung y oder des
Querschnittes der Flüssigkeitsgefäſse aa ändert sich
auch der Grad der Be- bezieh. Entlastung des Gewichtes G.
Es sei die Entfernung des Punktes D, um welchen sich der
Apparat mit den Gefäſsen aa dreht, vom Tachometermittel
= A, die Entfernung der Gefäſse aa vom Drehpunkte D sei B bezieh. C, so ist die
Belastung des Gewichtes G durch die in dem
rechtsseitigen Gefäſse a befindliche Flüssigkeit, wenn
das Gewicht der letzteren E ist,
E\,\frac{B}{A} und die Entlastung des Gewichtes G durch die in dem linksseitigen Gefäſse a befindliche Flüssigkeit, wenn das Gewicht der
letzteren E1 ist,
E_1\,\frac{C}{A}. Die Differenz beider gibt eine wirksame
Belastung des Gewichtes G von
E\,\frac{B}{A}-E_1\,\frac{C}{A}=\frac{C\,B-E_1\,C}{A} bei
einer bestimmten Höhenstellung der Schwungkugeln. Heben sich die Schwungkugeln, so
flieſst ein Theil der Flüssigkeit im Gewichte von e von
rechts nach links, E wird also um e kleiner und E1 gröſser, und die resultirende Belastung des
Gewichtes ist jetzt
\frac{(E-e)\,B-(E_1+e)\,C}{A}=\frac{E\,B-E_1\,C}{A}-\frac{e}{A}\,(B+C),
also um \frac{e}{A}(B+C) kleiner. Sinken
die Schwungkugeln, so tritt das Entgegengesetzte ein und die Belastung des Gewichtes
G wird
\frac{(E+e)\,B-(E_1-e)\,C}{A}=\frac{E\,B-E_1\,C}{A}+\frac{e}{A}\,(B+C),
also um \frac{e}{A}\,(B+C) gröſser. In der
Mittelstellung des Gewichtes G enthalten beide Gefäſse
aa ein gleich groſses Gewicht E2 an Flüssigkeit, es
wird also
\frac{E\,B-E_1\,C}{A}=\frac{E_2}{A}\,(B-C).
Verändert man nun die Entfernung y so, daſs B – C gröſser wird, so steigt auch
die Belastung des Gewichtes G, und umgekehrt, wenn B – C kleiner wird. Die
zusätzliche Belastung des Gewichtes G nach
stattgefundenem Heben
desselben wird aber auch kleiner und nach dem Senken gröſser, weil in Folge der
vergröſserten Entfernung y bei gleicher Neigung der
Gefäſse a gegen die Wagerechte mehr Flüssigkeit von der
einen nach der anderen Seite flieſst. Die Differenz E –
E1 wird also gröſser und dadurch die Ent-
bezieh. Belastung des Gewichtes G bei demselben Hube
nach oben bezieh. unten ebenfalls gröſser.
Denselben Effect wie die Vergröſserung bezieh. Verkleinerung der Entfernung y hat eine Vergröſserung bezieh. Verkleinerung des
Wagerechtquerschnittes der Flüssigkeitsgefäſse a, da
auch hierbei ein mehr oder weniger groſses Gewicht an Flüssigkeit von der einen zur
anderen Seite flieſst. Je gröſser der Ungleichförmigkeitsgrad eines Tachometers ist,
desto gröſser muſs die Ent- bezieh. Belastung des Gewichtes G für eine höhere bezieh. tiefere Stellung des Tachometers sein, um eine
Ausgleichung der Geschwindigkeitsdifferenz herbeizuführen.
Um also einen Apparat für ein Tachometer mit bestimmtem Ungleichförmigkeitsgrad
einzustellen, ist es nöthig, die Entfernung y oder den
Querschnitt der Gefäſse a oder beides zu reguliren.
Ein Widerstandsregulator mit Windflügeln nach der Construction von J. Meyer-Fröhlich in Basel (* D. R. P. Nr. 46118 vom
23. Mai 1888) ist in Fig. 7 dargestellt.
Die treibende Welle A übt mittels des Rades B auf das Rad D eine Kraft
aus, und wenn die Achse von D fest und unverschiebbar
gedacht wird, so übt D dieselbe Kraft auf E aus. Ist nun Beharrung im Bewegungszustande
eingetreten, so ist stets die treibende Kraft P gleich
dem Widerstände P1
; und zwar ist dies an allen Stellen des Mechanismus
der Fall.
Nun ist aber die Achse von D nicht fest gelagert,
sondern in einer um die Welle A beweglichen
Riemenscheibe C befindlich, kann also keinen Widerstand
bieten, wenn nicht derselbe künstlich hervorgerufen wird. Dies geschieht, indem um
die Scheibe C ein Riemen II gelegt wird, der ein Gewicht III trägt und auf diese Weise den
erforderlichen Widerstand leistet. Der Widerstand P1 rührt von dem Widerstände der Luft gegen die
Flügelbewegung IV und V
her und ist je nach der Umlaufszahl der Windflügel welle, mit welcher der
Luftwiderstand wächst, verschieden.
Wird nun eine Arbeitsmaschine, z.B. eine Drehbank, Hobelmaschine u.s.w., ausgerückt,
so überwiegt sofort die Cylinderkraft der Maschine die Gesammtwiderstände um das
Maſs, welches die ausgerückte Maschine beansprucht hatte, und verursacht eine
Beschleunigung der Welle A und dadurch eine Vermehrung
des Druckes von Seiten des Rades B auf Rad D. Wenn die Räder ED und
B gleiche Touren machen und das Gewicht so durch
die Drucke rechts und links ausgeglichen wird, daſs die Riemenscheibe C auf einem Flecke stillsteht, so kann man sich diesen
Zustand des Gleichgewichtes, bei welchem also die in B eingeleitete
Kraft P gleich ist der durch den Luftwiderstand der
Windflügel bedingten Kraft P1, und bei welchem die Kraft der Dampfmaschine genau gleich ist den
Arbeitswiderständen, auch so denken, als ob überhaupt alles stillsteht. Die bei
einer Beschleunigung der Maschine eintretende Beschleunigung von B würde dann gleichbedeutend sein mit einer kleinen
Bewegung aus der Ruhe heraus.
Durch diese kleine Bewegung wird D mitbewegt werden und
durch D auch E. Nun läſst
sich E aber nicht plötzlich aus seinem
Beharrungszustande herausbringen, dazu bedarf es einer gewissen Zeit. Diese kurze
Zeit ist aber gerade ausreichend, daſs B das Rad D für sich allein etwas dreht, dadurch die
Riemenscheibe C mitbewegt und das Gewicht III etwas hebt bezieh. aufzieht. Durch die Bewegung der
Riemenscheibe C wird mittels des an ihr befestigten
Zahnkranzes M die Zahnstange N verschoben und damit das Dampfventil etwas geschlossen. Mittlerweile ist
nun E aus seinem Beharrungszustande herausgekommen und
bewegt sich jetzt. Durch Drosselung des Dampfventiles wird aber der Gang der
Maschine wieder verlangsamt und die Bewegung von B hört
auf, d.h. nicht in Wirklichkeit, sondern B kehrt nur in
den Zustand des Gleichgewichtes zurück. E aber ist noch
immer in Bewegung und dreht nun seinerseits D in
umgekehrtem Sinne in die alte Lage zurück, wo nun wieder vollständige Ruhe, d.h.
Gleichgewicht herrscht, bis wieder ein neuer Anstoſs bei vermehrter Geschwindigkeit
der Dampfmaschine von B erfolgt.
Wird dagegen eine Arbeitsmaschine eingerückt, so tritt der umgekehrte Fall ein. Der
Gang der Dampfmaschine verlangsamt sich, das Rad D und
mit ihm die Riemenscheibe C wird in entgegengesetzter
Richtung gedreht, das Gewicht III gesenkt, die
Zahnstange N umgekehrt verschoben, d.h. das Dampfventil
mehr geöffnet.
Ein von R. Latowski in München (* D. R. P. Nr. 41226 vom
26. Februar 1887) angegebener Widerstandsregulator ist in Fig. 8 dargestellt.
Derselbe besteht im Wesentlichen aus einer Pumpe a,
deren Antrieb (in der Richtung des Pfeiles) von der Welle ausgeht, deren
Geschwindigkeit zu reguliren ist und welche eine beliebige Flüssigkeit entweder in
einen Behälter f, aus welchem die Pumpe dieselbe wieder
entnimmt, oder mittels eines geschlossenen erweiterten Rohres unmittelbar wieder zur
Pumpe zurück desto reichlicher fördert, je schneller jene Welle läuft. Es ist nun
einerseits die Weite der Durchfluſsöffnung e mittels
eines Regulirorganes, einer Klappe oder eines Ventiles d, regulirbar, andererseits befindet sich an einer Durchfluſsstelle b ein belastetes Widerstandsorgan, ein Kolben oder
Ventil c, welches mittels einer Stange h mit dem Regulator verbunden ist. Durch das
Regulirorgan d wird die Durchfluſsöffnung derart
bemessen, daſs für den Durchlauf der von der Pumpe geförderten Flüssigkeit bei einer
bestimmten Geschwindigkeit jener Welle ein gewisser Widerstand sich geltend macht,
welcher gleich dem dem
Organe c gegebenen Widerstände ist. Bei Vermehrung der
Geschwindigkeit bezieh. der durchlaufenden Flüssigkeitsmenge wächst der Widerstand,
welcher an dem Organe c zur Aeuſserung gelangt und
dieses so weit zum Ausweichen bringt, bis bei dem Geschwindigkeitsregulator das
Bewegungsmittel so weit abgestellt bezieh. der Zutritt desselben vermindert ist,
daſs die Geschwindigkeit jener Welle bezieh. die Menge der von der Pumpe geförderten
Flüssigkeit wieder nachgelassen hat. Auf diese Weise kann, jeder gewissen
Einstellung des Regulirorganes d entsprechend, für
jeden Geschwindigkeitsgrad jener Welle ein genau begrenztes Ausweichen des Organes
c stattfinden, wodurch die jeweilige richtige
Einstellung des Einlaſsorganes für das Bewegungsmittel für eine mittlere bezieh.
beabsichtigte Geschwindigkeit jener Welle erreicht ist.
Zur Regulirung von Seedampfschiffsmaschinen wenden P. W.
Sothmann und C. O. H. Kroll in Glückstadt,
Holstein (* D. R. P. Nr. 45582 vom 2. Februar 1888) den elektrischen Strom an. Eine
Plattenfeder steht unmittelbar mit dem Fahrwasser in Berührung, so daſs sie von dem
beim Stampfen und Schlingern des Schiffes sich ändernden Wasserdrucke mehr oder
weniger durchgebogen wird und dabei mehr oder weniger Contacte schlieſst, welche
eine gröſsere oder geringere Anzahl von Elektromagneten zum Schlieſsen der
Drosselklappe in Thätigkeit setzen.
Indirekt wirkende Regulatoren. Bei der an die Dampf- und Spinnerei-Maschinenfabrik und M. E. König in Chemnitz (* D. R. P. Nr. 40000 vom 19.
Januar 1887) patentirten Construction erfolgt der Antrieb des Regulators gemäſs der
Abbildung Fig.
9 durch die Kegelräder x1
x2 Der Regulator bringt
je nach dem Höhenstande der Manschette den Doppelkegel a mittels der Stange r und des Hebels z mit einem der beiden Räder x2 oder x3 des Wendegetriebes in Eingriff. Da der Doppelkegel
a auf der Spindel drehbar ist, nimmt er den
Drehsinn des mit ihm jeweilig in Eingriff stehenden Rades an und bewirkt dadurch,
weil ersterer wieder durch die Klauen b und d mit der Hülse c
beständig verbunden ist, eine Rechts- oder Linksdrehung der letzteren, welche
ihrerseits vermöge des an ihrem oberen Ende befindlichen Gewindes die Drehbewegung
in eine Auf- und Abwärtsbewegung der Mutter e umsetzt.
Diese Bewegung wird vermöge des mit der Mutter verbundenen, um f schwingenden Hebels g
auf das Regulirorgan übertragen.
Bei der in Fig.
10 dargestellten Construction von J. Béché
jr. in Hückeswagen (* D. R. P. Nr. 40294 vom 22. Februar 1887) ist auf der
Antriebswelle b das Kegelrad c befestigt; in dieses greifen die beiden Räder d und e ein, welche sich lose auf der Welle
a des Regulirgestänges aa1 bewegen. Je nachdem die auf der
letztgenannten Welle a befestigte Reibungskuppelung f in das Rad d oder e eingreift, wird der Welle a eine Rechts- oder Linksdrehung ertheilt. Das Rad d ist mit der
Regulatorspindel i befestigt, welche den Regulator in
Drehung versetzt. Das aus zwei Theilen bestehende Regulirgestänge aa1 ist durch ein
Gewinde h lose verschraubt, und verhindert der
angebrachte Bügel n eine Drehung des oberen Theiles a1. Kommt die
Reibungskuppelung f in Eingriff mit dem Rade e oder d, so wird durch
das Gewinde h das Regulirgestänge verlängert bezieh.
verkürzt. So entspricht jede Kugelstellung des Regulators einer bestimmten Drehung,
welche durch das conische Getriebe m und k auf die Regulirwelle übertragen wird.
Bei der durch R. Wilby in Britannia Terrace in England
(* D. R. P. Nr. 42212 vom 5. August 1887), angegebenen indirekten Uebertragung (Fig. 11 und
12)
bewirken zwei durch einen bewegten Theil der Maschine zu treibende Schaltklinken, je
nach Geschwindigkeits-Zu- oder -Abnahme, unter Regulatoreinwirkung in bekannter
Weise ein Verlängern bezieh. Verkürzen der Verbindung zwischen dem Tachometer und
dem Regulirungsorgane. Dieses kann eine Drosselklappe oder ein Expansionsschieber
bezieh. Ventil sein. In vorliegendem Falle wirkt der Regulator aber nicht direkt auf
die beiden Schaltklinken, vielmehr unter Vermittelung eines Hebelwerkes, so daſs
schon bei geringem Steigen des Regulators diejenige Klinke an ihrem Schaltrade
thätig wird, die ein Verlängern jener Verbindung bewirkt, bei geringem Fallen
dagegen die andere, ein Verkürzen der Verbindung herbeiführende Klinke. Die Klinken
erhalten ihren Antrieb mittels eines Rahmens, der durch einen bewegten Theil der
Maschine in Schwingung versetzt wird. Ein Schneckenradgetriebe ist überdies mit der
Achse der beiden Schalträder zu dem Zwecke in Verbindung, die auf Oeffnen des
Regulirorganes wirkende Klinke auszuheben, sobald das Oeffnen weit genug erfolgt
ist.
Der um Welle 6 schwingende Rahmen 10 erhält von der Maschine eine hin und her
schwingende Bewegung und trägt mittels Bolzens 11 die Schaltklinken 12 und 13,
welche bei normaler Geschwindigkeit der Maschine mit ihren Schalträdern 8 und 9
nicht zum Eingriffe gelangen, weil dazu das Maſs der Schwingung des Rahmens 10 nicht
ausreicht. Die mit der Drosselklappe oder dem Expansionsschieber oder Ventil in
Verbindung stehende, mit dem Regulator verbundene Stange 1, um deren Verlängerung
und Verkürzung es sich handelt, ist in bekannter Weise aus zwei Theilen hergestellt.
Dieselben sind durch eine Mutter 2 mit Rechts- und Linksgewinde, die ein
langgezahntes Stirnrad 3 trägt, verbunden. Die Zähne des letzteren stehen im
Eingriffe mit einem Kronrade 4, das auf der Welle 6 der beiden Schalträder 8 und 9
festsitzt. Letzteres ist im Lager 7 gelagert und dient zugleich dem schwingenden
Rahmen als Drehachse. Zur Führung der Mutter 2 dient ein mit Lager 7 verbundener
Halter 5. Die untere Schaltklinke 12 wird durch ein Gegengewicht oder Feder
eingerückt, wenn die Einstellung der Stange 1 dies gestattet. Die obere Klinke wird
für diesen Fall durch ihr Eigengewicht eingerückt. Zum abwechselnden Ein- und Ausrücken der Klinken
dient der Ausrücker 15. Derselbe sitzt stellbar auf dem die Klinken tragenden Bolzen
11 und faſst mit seitlichen Zapfen zwischen beide Klinken durch. Andererseits sitzt
stellbar auf dem Bolzen 11 der Arm 16. Derselbe erhält durch den bei 18 am Rahmen 10
drehbaren zweiarmigen Hebel 17 eine Drehung, wenn der Gang der Maschine die
Thätigkeit der einen oder anderen Klinke erfordert. Durch die mittels des Hebels 17
bewirkte Uebersetzung erfolgt diese Thätigkeit der Klinken schon bei der geringsten
Verschiebung des Regulatorstellzeuges. Auf den Endzapfen 19 des Hebels 17 legt sich
das gekrümmte Ende des Armes 21, der am Halter 20 des Lagers 7 drehbar ist und vom
Anschlage 24 der durch Arm 26 mit Stange 1 verbundenen Stange 22 beeinfluſst wird.
Die zwischen den Theilen 24 und 26 eingeschaltete, die Stange 22 umgebende Feder 27
soll das unbehinderte Einstellen des Regulators ermöglichen. Unten ist die Stange 22
noch in besonderem Halter geführt.
Beim Anlassen der Maschine stellt man den Arm 26 so ein, daſs Anschlag 24 den Arm 21
so weit niedergedrückt hält, daſs beim Auf- und Abschwingen des Rahmens 10 weder die
eine, noch die andere Klinke ihr Schaltrad drehen kann. Dies dauert dann so lange,
bis die Maschine mit normaler Geschwindigkeit läuft. Wird aber dann die
Geschwindigkeit zu gering, so fällt der Regulator, Stange 1 geht hoch und dadurch
erhält die obere Klinke 13 Eingriff. Diese dreht dann das Kronrad 4 und die Mutter 2
nach einer solchen Richtung, daſs eine Verkürzung der Stange 1 eintritt. Dadurch
wird dann die Drosselklappe mehr geöffnet bezieh. gröſsere Füllung gegeben, bis
unter Steigen des Regulators und Sinken der Stange 1 der Normalzustand wieder
erreicht ist. Wird dagegen die Geschwindigkeit zu groſs, so steigt der Regulator und
die Stange 1 senkt sich. Dadurch erhält die untere Klinke 12 Eingriff, und zwar
durch die Wirkung des Gegengewichtes 14 unter Aushebung der Klinke 13 durch den
Ausrücker 15. In Folge dessen wird Stange 1 verlängert und die Drosselklappe mehr
geschlossen bezieh. kleinere Füllung gegeben, bis der Normalgang wieder vorhanden
ist.
Bei eintretendem Geschwindigkeitswechsel greift der Regulator mit seiner direkten
Uebertragung gleichsam mit einem Sprunge in die Dampfzuströmung ein, und dann
erfolgt mittels der indirekten Uebertragung schrittweise die Adjustirung der Länge
der Stange 1, dem veränderten Kraftbedarfe entsprechend.
Zum Ausheben der auf Oeffnen des Regulirungsorganes wirkenden Klinke 13 ist ein
Ausrückarm 30 auf einer das Schneckenrad 28 tragenden Achse so eingestellt, daſs die
Mutter 2 nicht ganz bis an das Ende des Gewindes auf Stange 1 vorgeschraubt werden
kann.
Der Zweck der auf Stange 22 angeordneten Feder 27 besteht darin, ein freies
Einstellen des Regulators zu ermöglichen. Wird durch diesen die Stange 1 z.B. mehr abwärts
bewegt, als die Stange 22 mitfolgen kann, so wird durch Halter 26 die Feder 27
einfach zusammengedrückt. Nach einer Abänderung dieser Construction (* Zusatz D. R.
P. Nr. 46051 vom 1. August 1888) wird die durch das Schaltwerk einstellbare Stange
durch eine gewöhnliche Regulatorstange ersetzt.
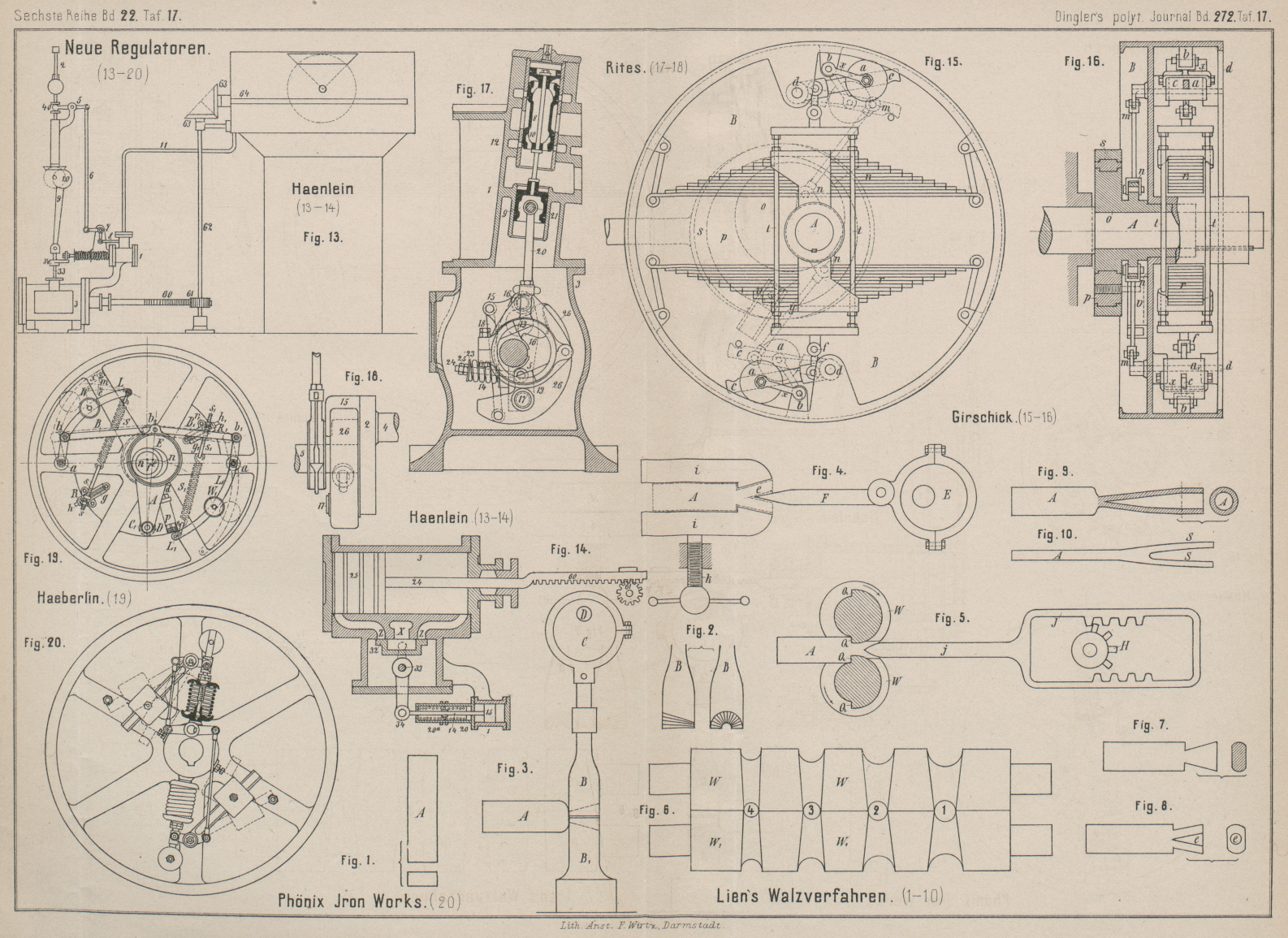
Der Regulator von P. Haenlein in Frauenfeld, Schweiz (*
D. R. P. Nr. 45303 vom 24. März 1888) ist für Dampf- und Wassermotoren bestimmt
(Fig. 13
und 14 Taf.
17).
Der Verstellapparat besteht aus dem Steuercylinder 1, dem Verstellcylinder 3, sowie
dem Regulator 2. Der Regulator wird mittels Riemenscheiben und Riemen von der
Haupttransmissionswelle in Bewegung gesetzt; weicht nun die Geschwindigkeit der
Kraftmaschine von der normalen ab, so beginnen die Regulatorkugeln zu spielen, und
die Stange 8 des kleinen Schiebers 16 wird entsprechend nach rechts oder links
bewegt, in Folge dessen auch der kleine Kolben 15, der bei normaler Geschwindigkeit
in der Mitte des Cylinders steht. Der Verstellcylinder 3, von welchem die Bewegung
des Schützen oder der Regulirklappen ausgeht, ist in seiner Construction gleich
einem Dampfcylinder, versehen mit Kanälen und Schieber, mit Kolben und Kolbenstange,
welche letztere zu einer Zahnstange 60 ausgebildet ist. Diese Zahnstange steht im
Eingriffe mit dem Zahnrade 61, das auf der senkrechten Welle 62 befestigt ist (Fig. 13) und
durch zwei conische Räder 63 und 63 die Querwelle 64 bewegt, welche, je nachdem sie
rechts oder links gedreht wird, die Klappen zwischen den Leitschaufeln öffnet oder
schlieſst und somit den Wasserzufluſs zur Turbine regelt. Da die Schieberstange 33
auf- und abwärts bewegt wird und sie zu gleicher Zeit eine drehende Bewegung hat, so
ist das obere Ende derselben mit einem Kreuzzapfen versehen. Das Drehen der
Schieberstange 33 geschieht durch den Kolben 15 des kleinen Steuercylinders 1. Der
Hebel 34 auf der Schieberstange ist mit einem Keile versehen, während die
Schieberstange eine längere Keilnuth hat. Ein gegabeltes Führungsstück am
Schieberkasten umfaſst die Nabe des Hebels 34 und hält diesen Hebel immer in
gleicher Höhe, während die Schieberstange und mit ihr der Schieber sich auf- und
abwärts bewegt. Beginnen nun bei veränderter Turbinengeschwindigkeit die
Regulatorkugeln zu spielen, so wird die Regulatormuffe 40 bewegt und setzt durch den
Querhebel 5 die Zugstange 6, den Winkelhebel 7 und die Schieberstange 8 den kleinen
Schieber 16 des Steuercylinders in Bewegung, wodurch der Kolben 15 des
Steuercylinders entsprechend gesteuert, der Hebel 34 und mit ihm der Schieber 32 des
Verstellcylinders entsprechend gestellt und der Kolben 25 des Verstellcylinders,
sowie die mit Zahnstange versehene Kolbenstange 24 nach rechts oder links bewegt
wird, so daſs der Wasserzufluſs zur Turbine entsprechend vermehrt oder vermindert
wird. Wenn nun der Schieber 32 nur eine Bewegung, und zwar nur eine solche in
wagerechter Richtung hätte, so könnte es leicht eintreten, daſs der Kolben 25 über das Ziel nach rechts
oder links verstellt wird, d.h. daſs er springt; aus diesem Grunde muſs die Bewegung
des Kolbens in Zwischenräumen erfolgen, was erreicht wird durch die senkrechte Auf-
und Abwärtsbewegung des Schiebers 32.
Die Zahnstange 60, in das Zahnrad 61 eingreifend, dreht die Welle 62, wodurch mittels
der conischen Räder 63 die Welle 64 bewegt, die Regulirklappen entsprechend
geschlossen und die Turbine wieder auf ihre normale Geschwindigkeit gebracht
wird.
Wenn dies eingetreten, so nehmen die Regulatorkugeln zunächst ihre normale Stellung
ein, wodurch der kleine Schieber 16 des Steuercylinders auch wieder in seine
mittlere Stellung zu stehen kommt; sobald dies geschehen, und ein Ueberdruck des
Wassers auf der einen oder anderen Seite des Steuerkolbens nicht mehr vorhanden ist,
wird dieser Kolben durch die Spiralfedern 20 bezieh. 20a auch wieder in seine
Mittelstellung gedrängt, und das Spiel kann von Neuem beginnen.
Die Schwungradregulatoren oder, wie Prof. Pfaff sagt, die Achsenregulatoren finden namentlich für
schnellgehende Maschinen eine bedeutende immer steigende Anwendung. Prof. Pfaff kritisirt diese zu so groſser Bedeutung gelangten
Regulatoren in der Zeitschrift des Vereins deutscher
Ingenieure, 1888 * S. 1065, wenig günstig, indem er behauptet, daſs
dieselben Schwankungen in der Geschwindigkeit der Maschinen hervorriefen, welche
groſs und anhaltend seien, wenn auch die minutliche Umdrehungszahl immer richtig
herauskäme. Gegen diese Anschauung wendet sich Dr. Pröll (Zeitschrift des Vereins deutscher
Ingenieure, 1889 S. 85), indem er auf seine Beobachtungen und
Untersuchungen hinweist, zu Folge deren bei einer im Crefelder Gesellschaftsverein errichteten Anlage nur ein
durchschnittlicher Unterschied von 2 bis 3 Proc. zwischen Leergang und voller
Belastung in der Umlaufszahl nachzuweisen gewesen wäre. Auch aus Untersuchungen von
Prof. Dörfel schlieſst Pröll, daſs Ueberregulirungen niemals stattgefunden hatten, also
Schwankungen nicht vorgekommen sein könnten. In allen Fällen, welche Schwankungen in
störendem Maſse zeigten, konnte die unvollkommene Wirkung des Regulators durch
Einsetzen stärkerer Federn und Beseitigung etwaiger Klemmungen beseitigt werden. Pröll bezeichnet gerade den schnellen Ausgleich ohne
oder mit nur sehr geringer Schwankung als eine hervorragende Eigenschaft der
Federregulatoren. Es bedarf keiner die Beweglichkeit des Regulators
beeinträchtigenden Luft- oder Flüssigkeitsbremse, um ein Ueberreguliren zu
verhindern, wie bei empfindlich gebauten Gewichtsregulatoren, bei denen der Einfluſs
der trägen Masse oft in unangenehmster Weise auftritt und um so mehr, je gröſser
dieselben sind.
Man kann dem Regulator die Verstellungsarbeit erheblich erleichtern, wenn man die Steuerungsorgane
entlastet. Die Anbringung entlasteter Schieber erscheint nur in einzelnen Fällen
gerechtfertigt, besonders bei hohem Druck, und dann auch nur, wenn gröſstmögliche
Einfachheit mit ihr verbunden ist. Kolbenschieber ohne
eingesprengte Dichtungsringe haben den Vortheil, anfangs bei guter Herstellung
genügend zu dichten und den Regulator fast gar nicht zu belasten; der Kolbenschieber
läuft sich aber bald undicht und hört auf, ein genau wirkendes und ökonomisch
arbeitendes Steuerungsorgan zu sein. Die Anwendung von Kolbenschiebern mit Dichtungsringen erscheint aber wegen des starken
Verschleiſses ausgeschlossen.
Es ist heutzutage für raschlaufende Maschinen Grundbedingung, daſs der Regulator auf
unentlastete Steuerungsorgane wirkt. Nothwendig ist dabei allerdings immer die
richtige Gröſsenauswahl für die Maschine und geeignete Kesselconstruction, und
hierin wird bei raschlaufenden Maschinen am meisten gesündigt.
Eine der werthvollsten Eigenschaften der Schwungradregulatoren ist die Möglichkeit
ihrer Berechnung in vollkommenstem Maſse und ihre günstige Anpaſsbarkeit für die
vorhandenen Umstände.
Ein Schwungradregulator von A. Girschick in Budapest (*
D. R. P. Nr. 46688 vom 4. September 1888) ist in Fig. 15 und 16
dargestellt.
Auf der Achse A ist die Scheibe B befestigt, auf welcher die Bestandtheile des Regulators montirt sind,
und zwar der Hebel cd, auf welchem das Gewicht a verschiebbar angebracht ist. Der Hebel cd bewirkt bei der Drehung um die Achse d einerseits eine Bewegung des Hebels md in derselben Richtung, andererseits wirkt er im
Punkte f auf die Zugstangen tt, welche mit den Federn rr in Verbindung
stehen. Der Hebel md ist durch die Stangen mn mit dem Excenter o in
Verbindung. Von den verschiedenen Stellungen des Excenters o hängt die Gröſse der Excentricität des Excenters p ab.
Hat der Gang der Maschine das bestimmte Maſs der Geschwindigkeit erreicht, so wird
das Gewicht a in Folge der Flugkraft vom Mittelpunkte
der Achse A fortgestoſsen, wodurch auch die Hebel cd und md in Bewegung
gesetzt werden; da aber der Hebel md durch die Stangen
mn mit dem Excenter o
in Verbindung steht, so wird der letztere derart aus seiner früheren Stellung
gerückt, daſs sich hierdurch die Excentricität des Excenters p verkleinert; zugleich verkleinert sich auch die dadurch regulirte
Dampfeinströmung im Dampfcylinder.
Während sich das Gewicht a vom Mittelpunkte A entfernt, wird es zugleich durch die um den Punkt C sich drehende Führungsstange x gegen das Ende des Hebels cd geschoben. Es
ist leicht ersichtlich, daſs dadurch die Empfindlichkeit des Regulators gesteigert
wird, indem bei Zunahme der Umdrehungszahl der Maschine nicht nur die Entfernung Aa, sondern zugleich auch der Hebelarm dc sich vergröſsert, und so summiren sich beide
Wirkungen.
Die Verschiebung des Gewichtes a am Hebel cd kann aber auch durch andere Mittel erreicht werden,
z.B. durch eine Führung.
Die Maschine, an welcher der in Fig. 17 und 18
dargestellte Regulator von F. M. Rites in Pittsburgh,
Nordamerika (* D. R. P. Nr. 40616 vom 12. Januar 1887), angeordnet ist, gehört den
einfach wirkenden senkrechten Maschinen an, deren Cylinder 1 an der Oberseite eines
Kurbelgehäuses 3 befestigt ist, das geeignete Endlager für eine Kurbelwelle 5
besitzt, welche Doppelkurbeln 2 besitzt. Mit den Zapfen 4 der Kurbeln sind die
Kolben der Cylinder 1 durch Pleuelstangen verbunden.
Die Ein- und Ausströmung des Dampfes in und aus den Cylindern 1 wird durch einen
Schieber vermittelt, der aus einem oberen Kolben 8 und einem unteren Kolben 9
besteht, die auf einer Schieberstange 10 befestigt sind. Die Schieberstange gleitet
in einer Hülse, die mit geeigneten Einlaſs- und Auspufföffnungen versehen und in
einem Schieberkasten 12 befestigt ist, der sich zwischen den Cylindern 1 befindet
und etwas gegen dieselben geneigt ist.
Bei der praktischen Ausführung des Regulators wird der Schieber durch ein Excenter 13
hin und her bewegt, dessen Ring 19 an einem Ende einer Excenterstange 20 befestigt
ist, deren anderes Ende durch einen Stift 21 mit dem Schieber verbunden ist. Der Hub
des Excenters wird, je nachdem es der Gang der Maschine erfordert, durch Einstellung
des Excenters gegen die Achse der Kurbeln regulirt, um den Weg des Schiebers und
somit den Expansionsgrad und den Punkt, an welchem die Dampfzufuhr abgeschnitten
wird, zu verändern. Ein Kurbelzapfen, der mit dem unteren Ende der Excenterstange
verbunden ist, würde in derselben Weise wirken wie das Excenter.
Das Excenter 13 ist so leicht gemacht, als mit der nothwendigen Festigkeit vereinbar
ist. Dasselbe ist ein einfacher Ring, der des einfacheren Einsetzens wegen aus
zusammengeschraubten Stücken besteht. An einer der Hälften des Ringes ist ein Ansatz
15 angebracht, welcher durch einen Zapfen 16 mit dem Arme einer der Kurbeln 2 der
Kurbelwelle 5 verbunden ist. Durch Bewegung des Excenters um den Zapfen 16 in der
einen oder in der anderen Richtung wird der Hub des Excenters und somit auch die
Strecke, um welche er den Schieber bewegt, vergröſsert oder verringert. Diese
Bewegung wird dem Excenter durch die Spannung einer Feder 14 ertheilt oder durch die
Fliehkraft eines Regulatorgewichtes, je nachdem die eine dieser beiden Kräfte oder
die andere stärker ist.
Am Kurbelarme 6 ist ein einfaches Regulatorgewicht 26 durch einen Stift 17 befestigt
und durch eine Stange 18 mit dem Ansätze 15 verbunden, durch welchen der Zapfen 16
des Excenters hindurchgeht. die relative Lage der Zapfen 16 und 17 des Excenters und
des Gewehtes gegen die Stange 18 ist derartig gewählt, daſs das Excenter und das Gewicht gezwungen sind,
sich in entgegengesetzten Richtungen zu bewegen, und das Gewicht der hin und her
bewegten Theile, nämlich der Excenterstange und des Schiebers, welche mit dem
Excenter verbunden sind, dem Regulatorgewicht entgegenwirkt, d.h. eine nach abwärts
oder auswärts gerichtete Bewegung des Gewichtes veranlaſst eine entsprechende
Aufwärtsbewegung des Excenters und der entsprechenden Theile, und umgekehrt. Bei der
gezeichneten Construction sind das Regulatorgewicht und das Excenter am Kurbelarme
auf entgegengesetzten Seiten der Welle eingelenkt, aber eine derartige Anordnung ist
nicht unbedingt nothwendig, weil beide an derselben Seite eingelenkt und durch
geeignete Glieder mit einer Zwischenhülse verbunden sein könnten, wodurch die
bewegten Theile und das Regulatorgewicht ebenso gut ausbalancirt würden. Die durch
die Fliehkraft bewirkte Auswärtsbewegung des Gewichtes 26, durch welche der Hub des
Excenters vermindert wird, findet entgegen der Spannung der Feder 14 statt, welche
letztere die Tendenz hat, den Hub des Excenters und den Weg des Schiebers zu
vergröſsern, wenn dies durch gröſsere zu leistende Arbeit oder geringere
Dampfspannung nothwendig wird. Die Feder 14 drückt mit einem Ende gegen einen Ansatz
22 auf dem Kurbelarme und am anderen Ende gegen einen Anschlag 23 auf einem Stifte
24, welcher frei durch eine Oeffnung im Kurbelarme hindurchgeht und mit dem Gewichte
26 verbunden ist. Die Spannung der Feder 14 kann durch die Einstellung einer Mutter
25 regulirt werden, welche auf ein Schraubengewinde auf dem Stifte 24 aufgeschraubt
ist und ein Widerlager für den Anschlag 23 bildet.
Die Dampfmaschinen von A. L. Ide und Comp. in
Springfield, Illinois, Nordamerika, welche H. Haeberlin
im Praktischen Maschinenconstructeur, 1889 * S. 83,
beschreibt, haben die in Fig. 19 dargestellte
Anordnung eines Schwungradregulators. Der Arm A der
Excenterscheibe E ist bei C1 mit der Riemenscheibe verzapft, so daſs
die Veränderung der Excentricität der Scheibe durch Verschiebung des Mittelpunktes
e derselben auf dem Kreisbogen nn erfolgt. Die Hebel L
und L1 tragen die
Gewichte W und W1 und haben in a
bezieh. in a1 ihre
Drehpunkte. Durch die Gelenke B und B1 sind die Hebel L und L1 mit der Excenterscheibe verbunden. Durch den
Ausschlag der Gewichte W und W1 beim Umlaufe der Maschine kommen diese
und die Hebel L und L1 in die in der Zeichnung punktirt angedeutete Lage,
vorausgesetzt, daſs dabei durch die Centrifugalkraft der Widerstand der Spiralfedern
überwunden wird. Die excentrische Scheibe kommt damit in die ebenfalls punktirte
Stellung, der Mittelpunkt derselben e also nach f; die Excentricität der Scheibe ist nun am kleinsten
und in Folge dessen der Schieberweg am kürzesten. Die Spannung der Spiralfedern wird
auf die folgende Weise regulirt: Die Schrauben s und
s1, in deren Köpfe
die Federn eingehakt sind, gehen durch die Oesen r und
r1 der Blöcke R
und R1
, welch letztere mittels der Schrauben hh1 in radialer
Richtung in den Schlitten g und g1 verstellbar sind. Befindet sich nun
z.B. der Block R in der in der Figur gezeichneten
Stellung, nämlich in der äuſsersten, so würde der gegenüberliegende Endpunkt der
Feder bei der Drehung nach links den Kreisbogen m
beschreiben, vorausgesetzt, daſs die Feder keine Dehnung erleidet. Bringt man aber
den Block R durch Drehen der Schraube h in die geringste Entfernung vom Centrum der
Riemenscheibe, so müſste unter derselben Voraussetzung der Endpunkt der Spiralfeder
den Kreisbogen c beschreiben. Da jedoch in Folge der
Verbindung der Feder mit dem Hebel L der als Endpunkt
der Feder betrachtete äuſserste Zapfen des Hebels L
nach x gelangt, so folgt, daſs die Feder durch den
Ausschlag der Gewichte W und W1 mehr gedehnt wird, wenn sich R in der innersten, der Maschinenwelle zunächst
liegenden Stellung befindet, als wenn man R in der in
der Fig. 4
gezeichneten Lage läſst. So hat man es mit Hilfe der Schrauben h und h1 in der Hand, den Spiralfedern die gewünschte
Spannung zu geben und damit das richtige Einwirken der Gewichte W und W1 auf die Excenterscheibe bei leichter und schwerer
Belastung der Maschine zu veranlassen, so daſs die Umdrehungszahl der letzteren
dabei nur um ein Minimum variirt.
Um die Stöſse zu mildern, welche in den Regulatortheilen durch die Veränderlichkeit
in der Belastung der Dampfmaschine unfehlbar hervorgerufen werden würden, verbindet
man das Ende des einen Gewichtshebels L mit dem Puffer
D. Dieser besteht aus einem Cylinder und Kolben;
die Kolbenstange ist auſserhalb des Cylinders bei d
drehbar am Arme der Riemenscheibe verzapft, so daſs der Cylinder des Puffers dem
Kreisbogen, welcher vom Endpunkte des Hebels L1 beschrieben wird, frei folgen kann. Der Cylinder
ist mit Glycerin gefüllt, und der Kolben hat kleine Löcher pp, durch welche die
beiden Kolbenseiten mit einander verbunden sind. Haben nun die Hebel L und L1 bei plötzlicher Entlastung der Maschine die
Tendenz, von der gezeichneten in die punktirte Stellung zu gelangen, so gestattet
der Puffer diese Veränderung der Lage derselben nur allmählich, da das Glycerin
durch die Oeffnungen pp nur langsam auf die
gegenüberliegende Kolbenseite gelangen kann.
Bei einer im Iron, 1889 * S. 244, beschriebenen Maschine
der Phönyx Iron Works in Meadville, Philadelphia, wird
der in Fig.
20 dargestellte Schwungradregulator benutzt, dessen Construction aus der
übersichtlichen Zeichnung unmittelbar verständlich wird.